BESOIN NON SATISFAIT
Pour remédier à la pénurie de main-d’œuvre et à la pénibilité du travail, les fabricants doivent investir massivement dans la robotique et l’automatisation. Or, les PME ne disposent pas nécessairement des liquidités nécessaires à cet effet. Les technologies robotiques collaboratives offrent un excellent compromis entre la résolution des problèmes de main-d’œuvre et l’obtention d’un retour sur investissement rapide tout en investissant dans des technologies novatrices.
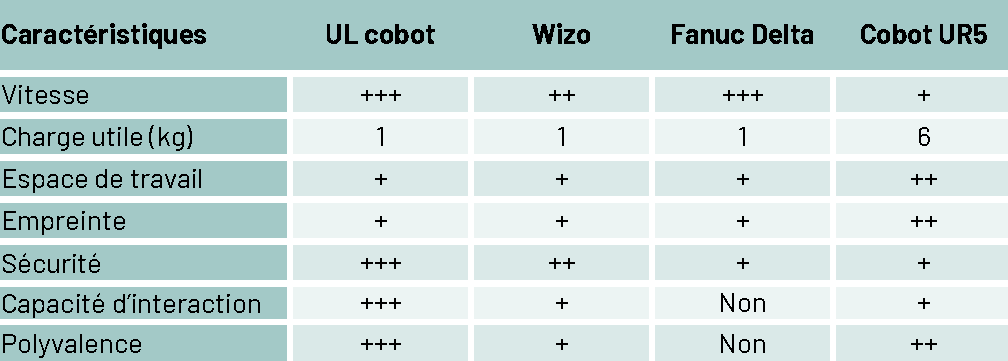
En tant que nouvelle tendance dans l’industrie manufacturière, les cobots doivent être faciles à manipuler, efficaces, avoir une vitesse ou une charge utile élevée, être intuitifs d’utilisation, compacts et sûrs en plus d’offrir un retour sur investissement à court terme. Les cobots en série actuels ne possèdent pas toutes ces caractéristiques.