TECHNOLOGY OVERVIEW
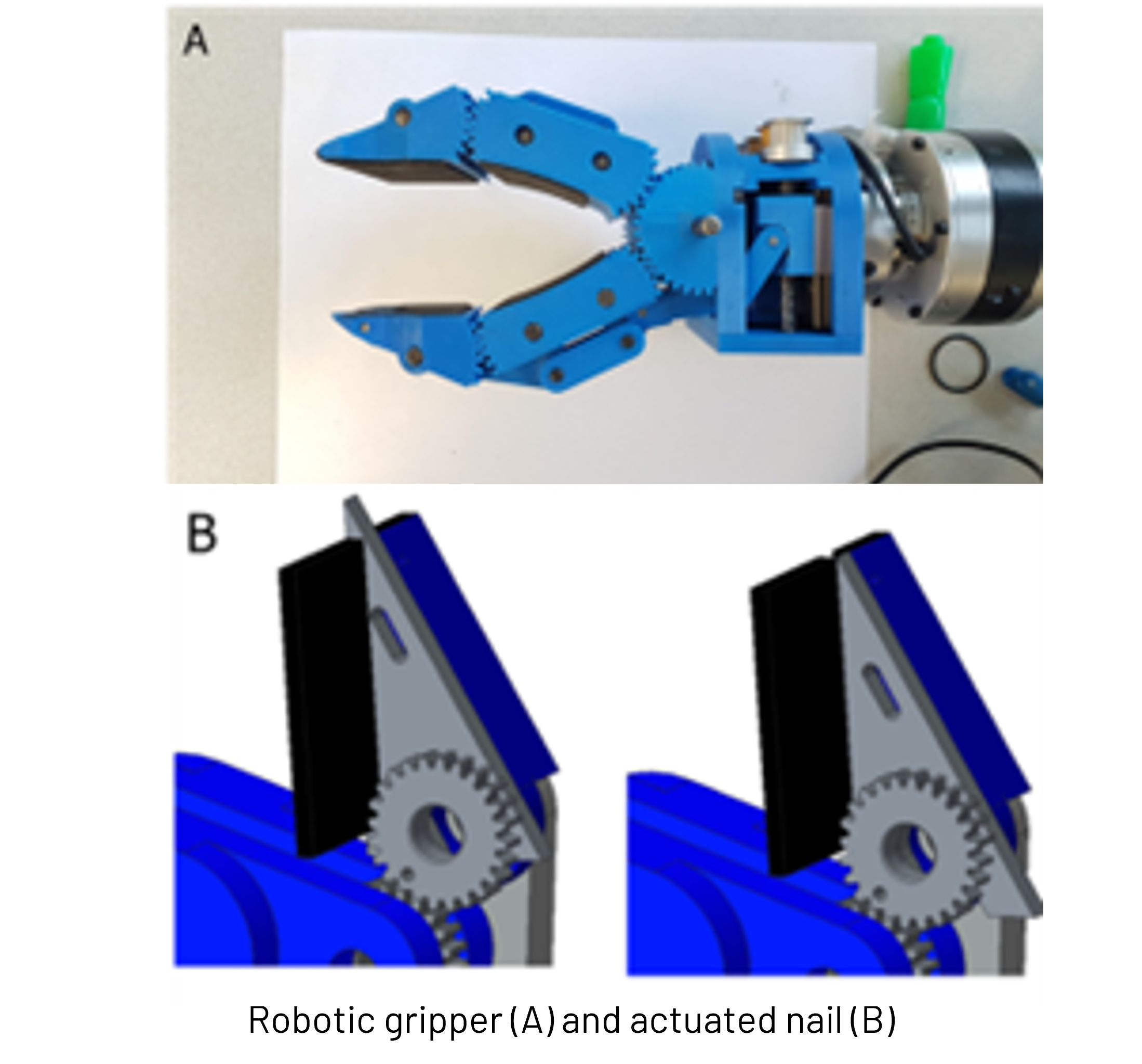
The Robotics Laboratory at Laval University has developed an innovative gripper technology featuring two multi-phalangeal fingers, one of which is equipped with a nail.
The gripper employs planetary gears to enable the fingers to achieve extensive travel and is driven by motors located in the base, which use spur gears. The gripper is under-actuated, meaning that its parallel grip robotic hand has joints that are planetary mechanisms, allowing for compliance and automatic adaptation to positioning errors during the grip.
Additionally, the gripper includes a thumbnail for easy insertion of the thumb under objects, an integrated force sensor, and a rigid surface-based approach method that eliminates the need for robot intervention.
Finally, the gripper has been optimized for facilitating manufacturing.
COMPETITIVE ADVANTAGES
- Picking, grasping and scooping functions
- Repeatable even for flat items (e.g. books, sheets, etc)
- Very efficient for soft items (textiles, films, etc.)
- Can be used in cluttered environment
- Can be mounted on any robotic arm
BUSINESS OPPORTUNITY
- Technology available for in-licensing
- Seeking for industrial partner
- Seeking investment and research partnership
- Eligible for governmental financing through program for industry/academia
MARKET APPLICATIONS
- Industrial robots
- Warehouse robots
IP PROTECTION
- Provisional patent application
VIDEO